6DOF Robot Arm
As the mechanical and electrical robot arm team lead at my design team UBC Open Robotics, I had the opportunity to lead a team of 7 engineering students through a project lifecycle from concept to 3D printed prototype. This involved setting timelines and leading design reviews for both mechanical structural design and electrical circuit design.
What did I do?
Led multiple design reviews involving checks for FEA, DFA, and DFM, leading to reduced stress concentrations and project lead time by 1 week.
Analyzed stress and deformation with FEA in structural frames, reducing weight by 20% and minimizing deflection by 65%.
Tested 3D printing tolerances for print overhang angles and hole shrinkages, ensuring DFM compliance.
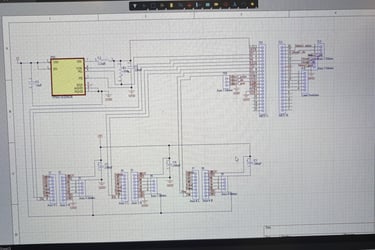
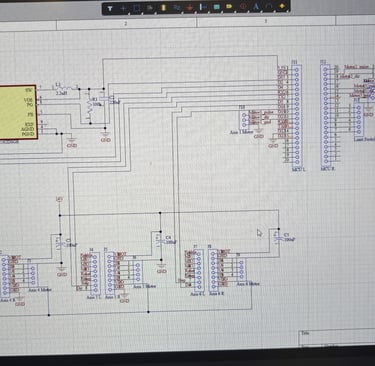
Selected optimal motors, motor drivers, microcontrollers and sensors such as encoders and IMUs.
Assessed application needs and selected components according, including motors, motor drivers, encoders, MCUs and IMUs.
Assessed material selection and selected a hybrid design involving both PLA and PETG.
Skills:
CAD (Onshape)
FEA (SolidWorks)
FDM 3D Printers (Bambu Lab P2S)
Hand Tools (screw driver,
Part Selection (Motors, Bearings, Pulleys)
Project Management